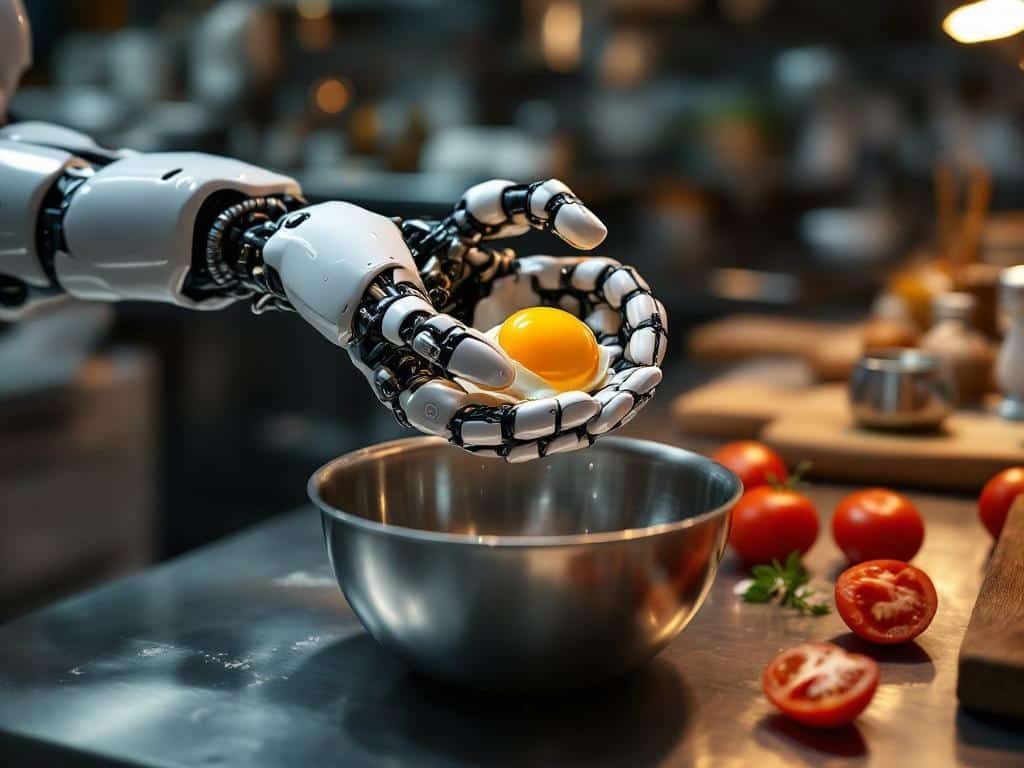
Genesis AI hat mit GENE-26.5 eine vielbeachtete Demonstration autonomer, menschenähnlicher Feinmotorik in der Robotik veröffentlicht, indem eine Roboterhand eine 20-Schritte-Mahlzeit zubereitet, Klebearbeiten durchführt und einen Rubik's Cube löst – alles vollautonom und unbeschleunigt.
- Mit einer Finanzierung von 105 Millionen Dollar hat Genesis AI eine Roboterhand demonstriert, die komplexe Alltagsaufgaben vollautonom und in Echtzeit meistert.
- Konkurrenten wie Kyber Labs warnen jedoch, dass solche humanoiden Hände aktuell noch zu störanfällig, zu teuer und folglich kaum praxistauglich seien.
- Um sich in Europa wirtschaftlich durchzusetzen, müssen die Systeme künftig nicht nur unter Dauerlast funktionieren, sondern auch den strengen Richtlinien des EU AI Acts entsprechen.
Genesis AI positioniert sich als Pionier, der das "Schwierigste ungelöste Problem" der Robotik – die Manipulation – lösen will, indem es einen Full-Stack-Ansatz verfolgt. Das Startup baut nicht nur ein robotik-natives Foundation-Modell, sondern entwickelt auch eine 1:1 menschenähnliche Hand, einen nicht-invasiven Datenhandschuh zur Erfassung von Bewegung, Kraft und Berührung sowie einen Simulator, der physische Experimente komprimiert. Dieser Ansatz unterscheidet sich von bisherigen Strategien, die sich hauptsächlich auf Simulationen stützen. Mit einer Finanzierung von 105 Millionen Dollar, unter anderem von Eclipse und Khosla Ventures, ist Genesis kein kleines Projekt. CEO Zhou Xian betont, dass die Kontrolle über die Hardware entscheidend für die Entwicklung allgemeiner physischer KI ist.
Im Gegensatz dazu warnt Kyber Labs, ein weiteres Startup im Bereich Robotik, vor der Realität der aktuellen Robot-Hand-Technologie. Tyler Habowski von Kyber Labs kritisiert, dass es "buchstäblich keine Roboterhände gibt, die routinebasierte Arbeit verrichten", da die besten Hände Hunderttausende von Dollar kosten und zudem äußerst störanfällig sind. Kyber Labs argumentiert, dass Robotik-Hände nicht nur kinematisch, sondern auch kraftgesteuert sein müssen, um praktikabel zu sein. Sie setzen auf drehmomenttransparente Aktuation, bei der Motoren gleichzeitig als Kraftsensoren fungieren. Ihr Fokus liegt auf robusten, erschwinglichen Lösungen für spezifische kommerzielle Anwendungen, wie zum Beispiel in klinischen Laboren, statt auf dem humanoiden "Alleskönner".
Diese Diskrepanz verdeutlicht die aktuelle Kluft in der Robotik zwischen beeindruckenden Demonstrationen und der praktischen Implementierbarkeit. Genesis muss nun beweisen, dass ihre Technologie nicht nur spektakuläre Aufgaben bewältigen, sondern auch unter Dauerlast zuverlässig und wirtschaftlich arbeiten kann. Die Kosten der Produktion, die Haltbarkeit, die Servicefreundlichkeit und die Ersatzteilversorgung sind entscheidende Faktoren, die über den Erfolg von Robot-Händen entscheiden werden. Eine Roboterhand muss letztlich weniger kosten als der Mensch, dessen Arbeit sie ersetzt, und darf nicht ständig ausfallen, um wirtschaftlich rentabel zu sein.
Für den DACH-Raum ist diese Entwicklung besonders relevant, da viele Industrie- und Laborprozesse hoch standardisiert sind, aber Feinmanipulation derzeit noch zu teuer ist. Klinische Labore, Qualitätssicherung und Elektronikfertigung könnten frühe Anwendungsfelder sein, in denen die Workflows klar definiert sind. Gleichzeitig müssen Unternehmen in der EU die verschärften Regelungen des EU AI Acts beachten, die ab August 2025 in Kraft treten. Das bedeutet, dass Dokumentation, Risikomanagement und Verantwortlichkeiten frühzeitig in die Entwicklung integriert werden müssen, besonders wenn Roboter in menschennahen Umgebungen eingesetzt werden. Der zukünftige Erfolg von Robot-Hand-Startups wird nicht durch spektakuläre Demos, sondern durch Servicefähigkeit, Zuverlässigkeit und messbare Produktivität in etablierten Prozessen bestimmt.
❓ Häufig gestellte Fragen
✅ 9 Claims geprüft, davon 8 mehrfach verifiziert (digital.nemko.com)
📚 Quellen